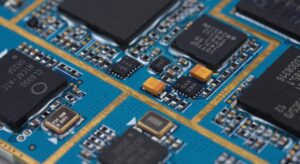
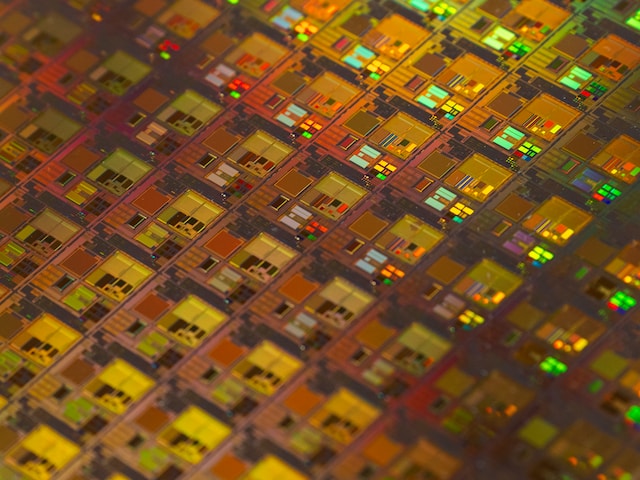
As the complexity of silicon ICs increases, automation of IC design becomes increasingly important. In world practice, companies specializing exclusively in IC design and possessing advanced CAD systems are being created.

The rapid development of microelectronics and the increasing complexity of radioelectronic equipment led to the need to improve and create new microelectronic products with a large number of elements.

We should also note a number of obvious threats that have appeared relatively recently in the development of both global and domestic microelectronics and logically follow from this new for us chip design paradigm.
The development of modern microelectronics is characterized by the development of a large number of types of integrated circuits, primarily the creation of large and ultra-large integrated circuits and microprocessors, as well as systems on a single The development of microelectronics is characterized by the development of a large number of types of microcircuits. At the same time, mass production of integrated circuits of the medium level of integration for all types of radioelectronic equipment will continue.
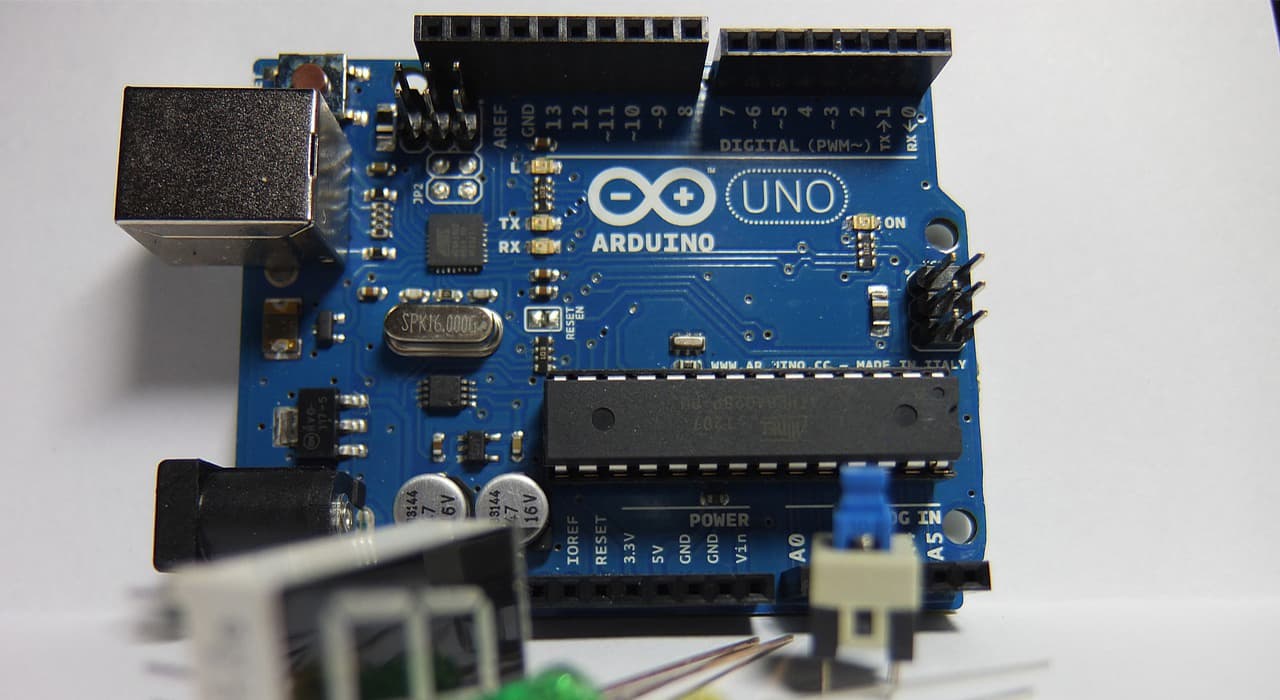
The applications for microcontrollers are limitless. They are used in all kinds of electronic devices for control. In addition, they can be found in all household appliances - microwaves, electric kettles, irons, washing machines - a microcontroller can be programmed for any function

Microelectronics are used in the manufacturing of automatic cat litter boxes.

Machine learning development company we implement your project using artificial intelligence.

Call tracking has emerged as a vital tool for businesses seeking to optimize their marketing efforts.

GetDevDone is a white-label web development partner for small and medium digital marketing agencies. Professional front-end development for your clients on time and on budget.
Stanislav Ostrovskiy from Kodjin FHIR Server has mentioned our website in his latest post about SMART on FHIR.

You are always welcome at our truck and trailer wash bay in Vancouver. Here you will be welcomed with excellent service and quality washing of your truck.